I’m writing this as much for my own use as anything else – I keep having to re-invent this solution every time I fix a vintage radio.
Most vintage radios are AM only, and in my part of the world, the only thing on AM is talk radio. Even if that weren’t the case, let’s be honest, most of what people listen to these days is streamed. I don’t like my radios to be shelf-queens, I want to be able to use them and honestly, the sound from the bigger radios is great.
One solution to this is to add an aux-in so that you can plug in an external source and play it through the radio. this certainly works (and you can use most of what is here to do that), but you still need a Bluetooth dongle and leads, and you have to charge it up and turn it on and switch the radio to aux-in. This solution wires the Bluetooth ‘dongle’ into the radio directly, so that it comes on when the radio comes on.
Overview
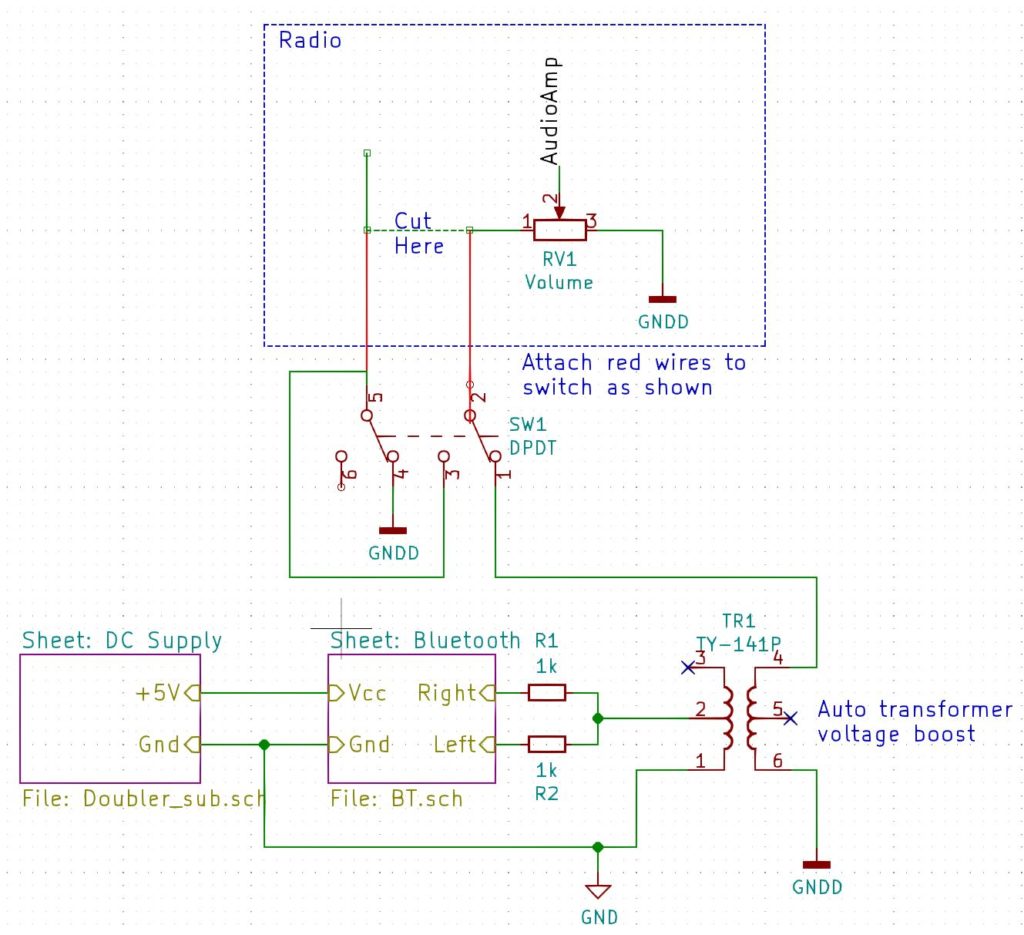
This shows a high-level view of what we are going to do:
Radio Modifications
Let’s look at the radio block first. The modification here is the same regardless of what external source we are going to wire in. We are going to wire our new audio source across the volume control.
Find the lead going to the volume control that is not connected to ground and does not go to the audio ouput stage. we will cut this wire and route it to a double-pole double-throw switch. A double-pole double-throw switch is simply a switch with two positions (double-throw) that switches two sources at the same time (double-pole). In one position the switch will connect that wire back to the volume control. In the other position it will connect our new audio source instead.
NOTE: It is a good idea to use shielded cable to make the connections between the radio and the switch. Connect the shield to chassis ground.
In the diagram above you can see (hopefully) that when our new audio source is connected, the original one is connected to ground rather than just left floating. This helps stop sound from the RF/IF stages of the radio from bleeding through to the speaker.
Bluetooth Module
The next block to look at as the one marked Bluetooth. You will see that the right and left channels are connected together via two 1k resistors. The use of these resistors prevents the output from one channel destroying the other channel.
Transformer
The next block we will talk about is the auto-transformer. This can serve two purposes.
The first is to boost the output of the Bluetooth module so that it has about the same loudness for a given volume setting as the radio itself. The particular model I am using is the TY-141P. If it is wired as shown in the diagram it gives a 1:2 voltage boost, which seems about right on all the radios I have modded. Triad make another transformer – the TY-142P that can give a boost of 1:2.24 or 1:4.48 depending on how it is wired.
The second purpose is that it can act as an isolation transformer to decouple the new audio source from the radio. This can help to remove ground-loop hum that can arise depending on how the new source is powered. In some scenarios, the chassis ground (GNDD) may be the same as the power supply ground (GND).
NOTE: The point that the auto-transformer is connected to chassis ground can be important. I have found that if you connect it to the volume ground terminal, you will hear hash from the Bluetooth receiver when listening to broadcasts. Experiment with different locations. If all else fails, use a three-pole double-throw switch to disconnect the power to the Bluetooth unit when listening to broadcasts.
Bluetooth Module Details
My preferred Bluetooth module is the KRC-86B, pictured below:
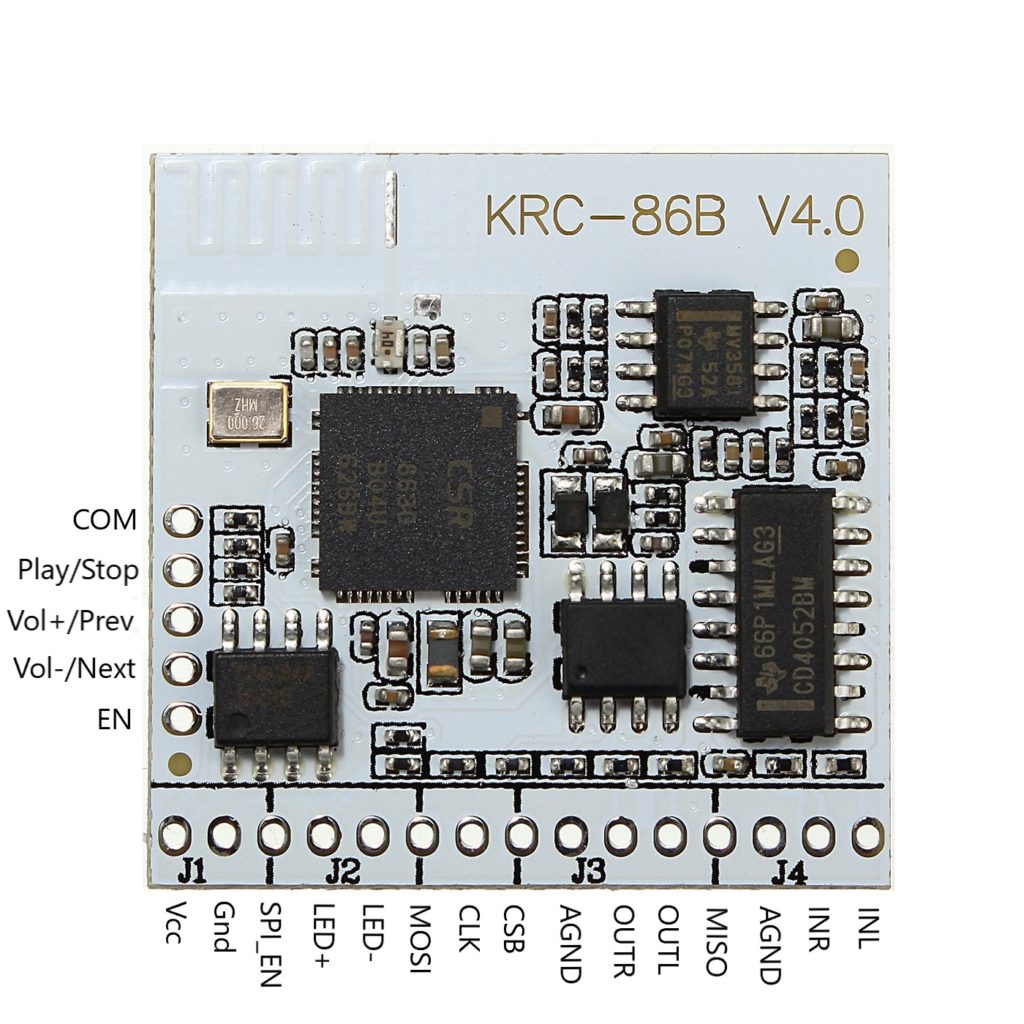
There are a lot of possible connections that we aren’t going to use. We are just going to provide it with a Vcc of +5V and use OUTL and OUTR like so:
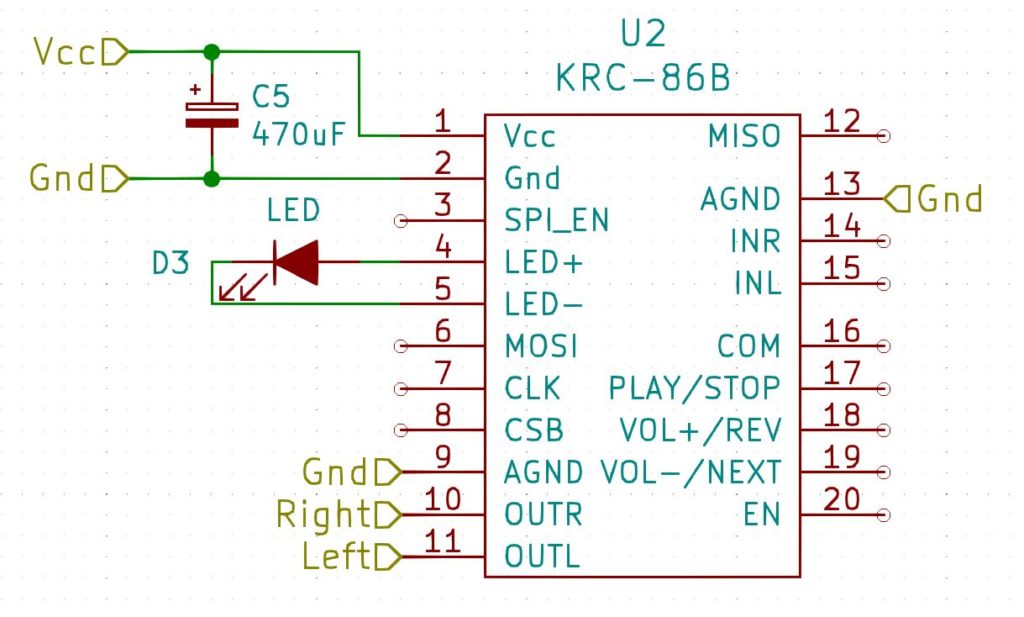
The LED indicates the state of the module. If it is connected it will be steady. If it is not connected it will be flashing, and if there is no power, it will be off! The capacitor is just a decoupling capacitor. Both of these are normally provided with the module.
Power Supply Details
The KRC-86B needs 3.7V to 5V. You could provide this with a battery pack or an external 5V supply and you could wire this power source in to the switch so that it only powered the module when it was selected as an input, but you would need a three-pole double-throw switch to do that.
The module only draws at most 80mA, so let’s see if we can provide that directly from the radio. We will probably need to convert some AC voltage into a DC voltage. Some radios have a transformer that provides the filament voltage, and these are probably the cleanest way to power the device. We can just convert the 6.3V AC into 5V DC. Another alternative I have used is to connect my power supply in parallel with the filament of a vacuum tube.
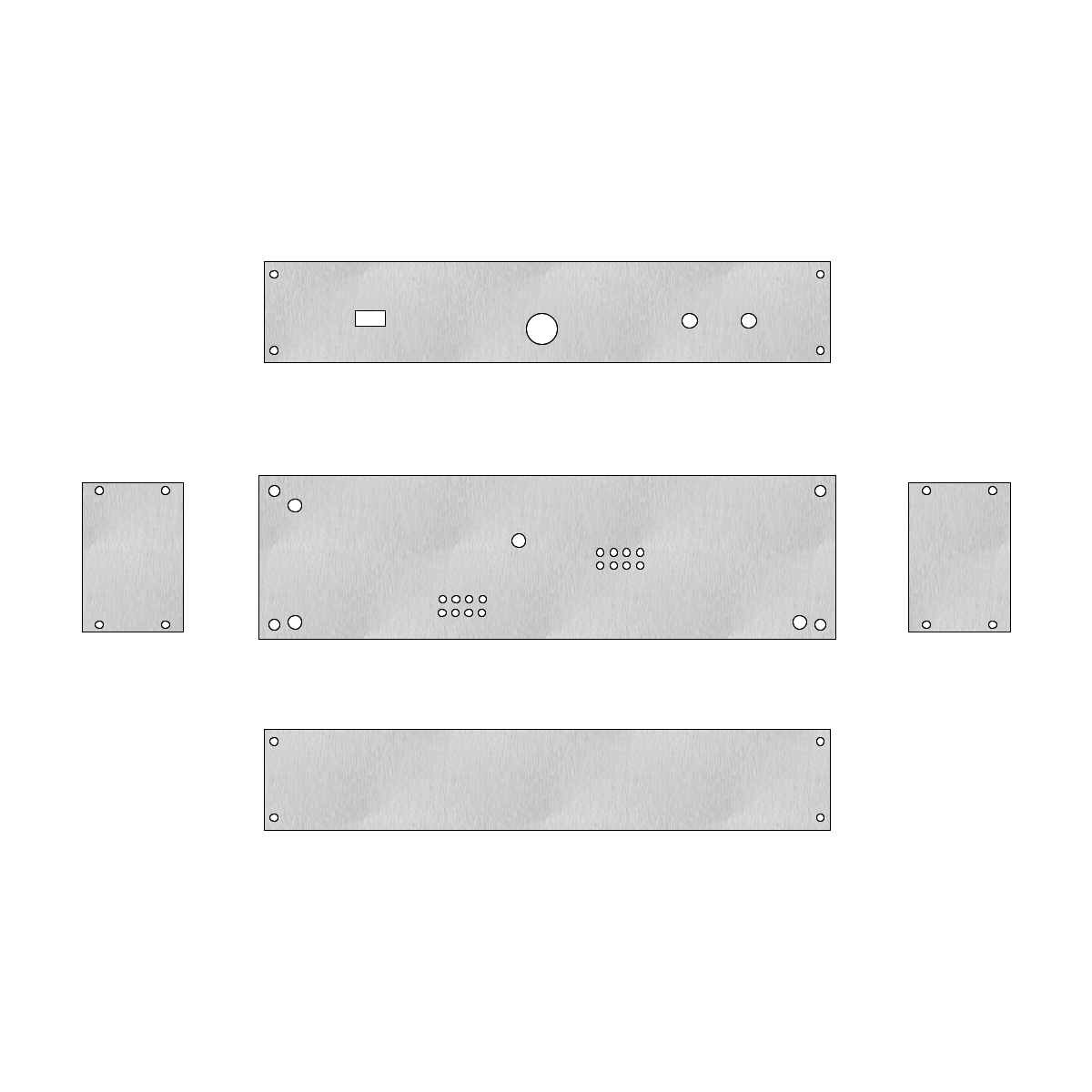
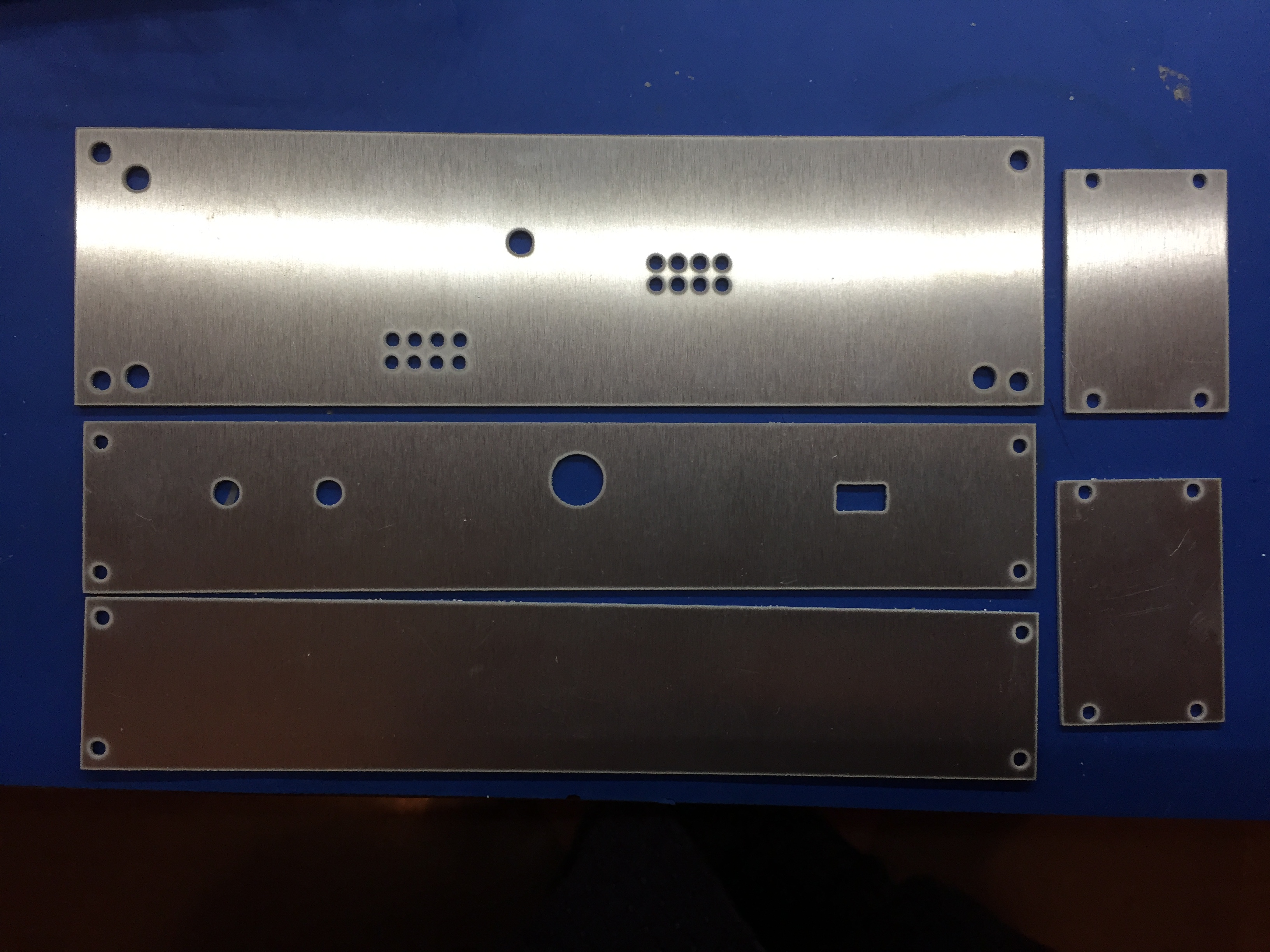
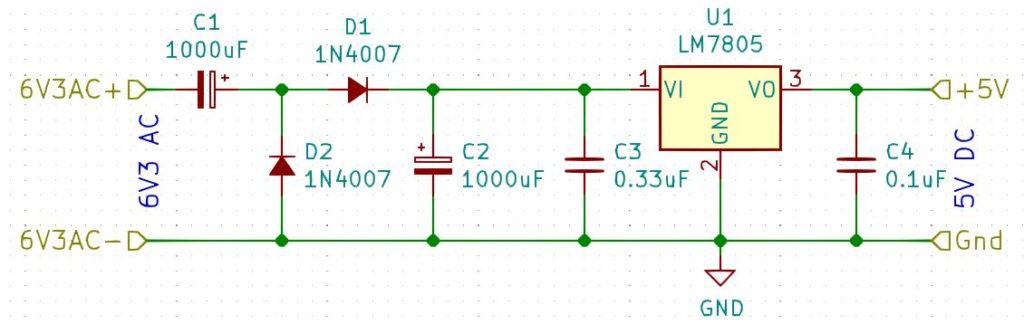
The basic idea is to rectify the AC, smooth it and then feed this through a 5V voltage regulator. 8V-12V is ideal for using a bridge rectifier, however 6.3V won’t provide a high enough rectified and smoothed voltage to feed a 5V voltage regulator, so in this case we need to use a voltage doubler as in the circuit below:
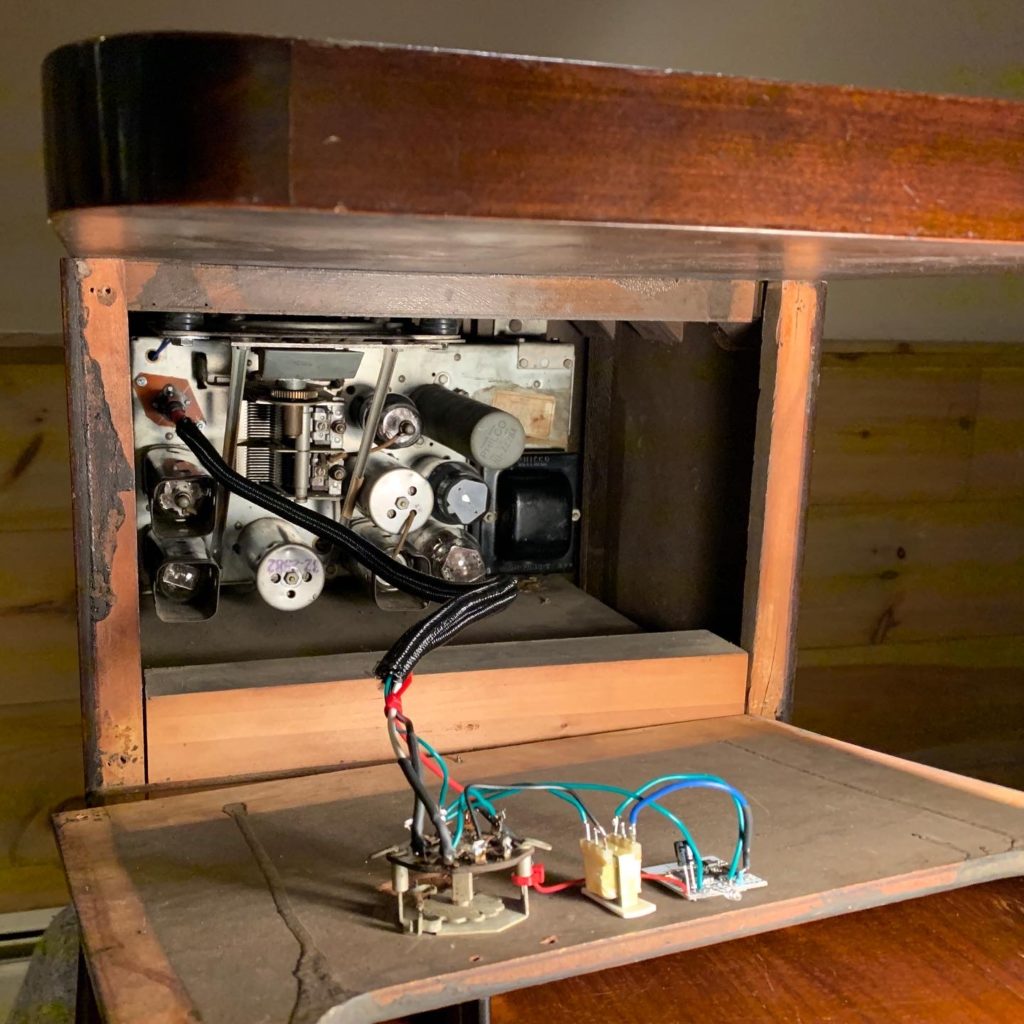
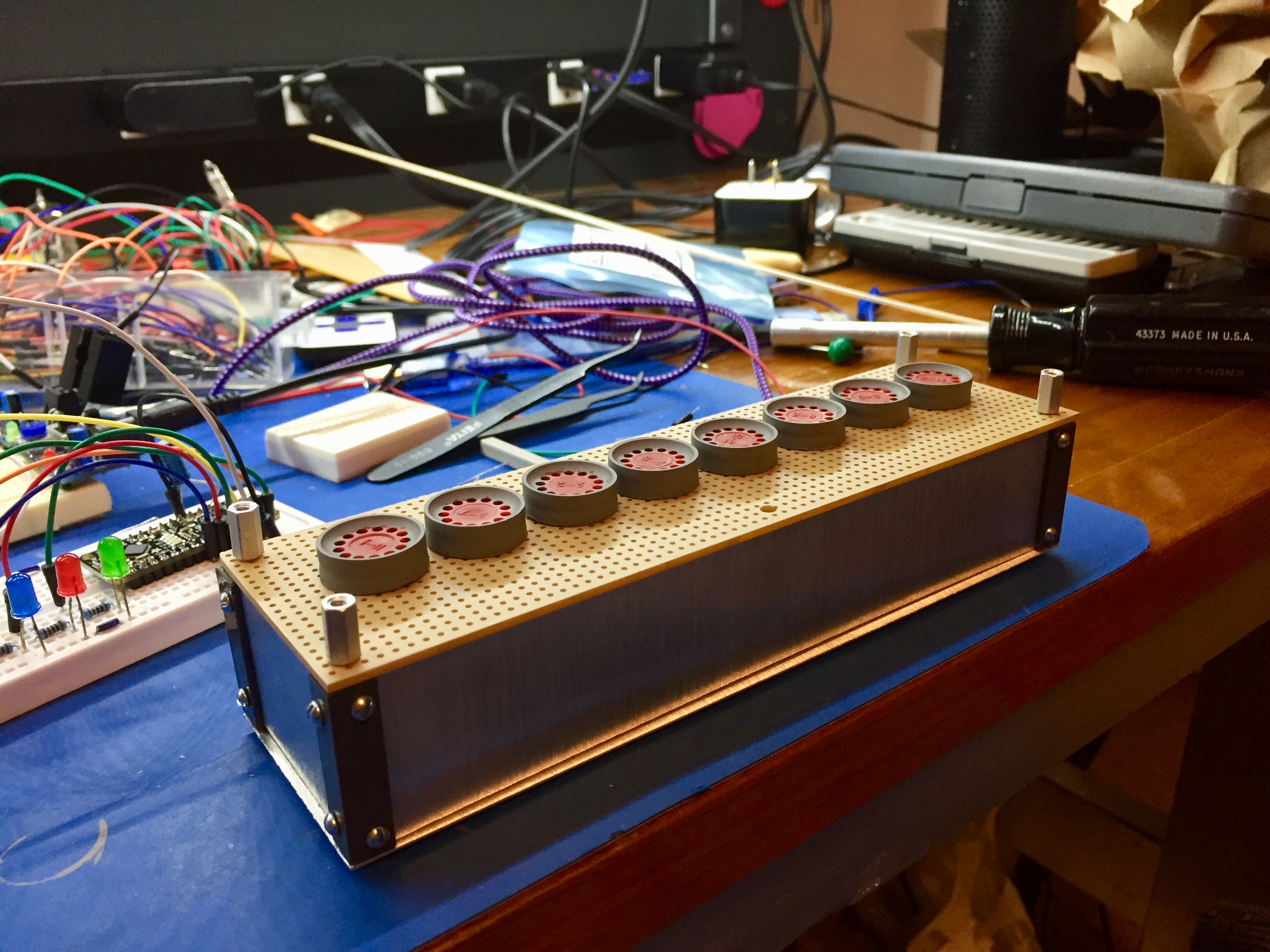
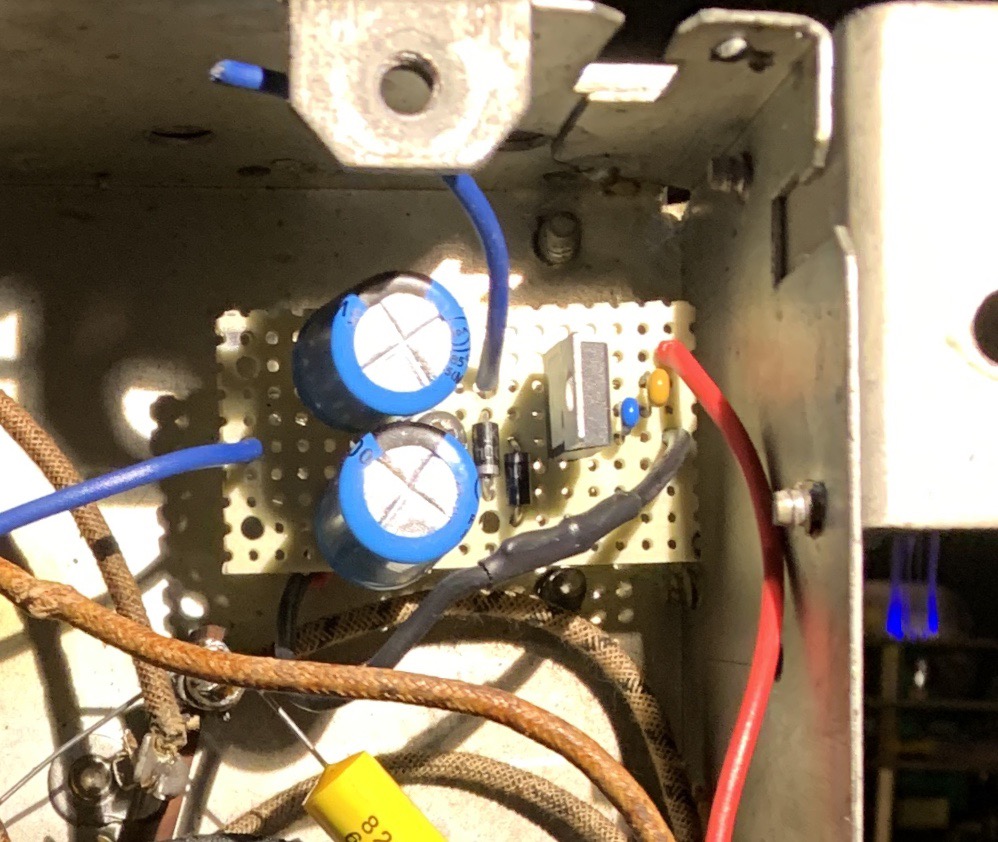
Here’s what it looks like. In this case, there was a handy post I can screw it to:
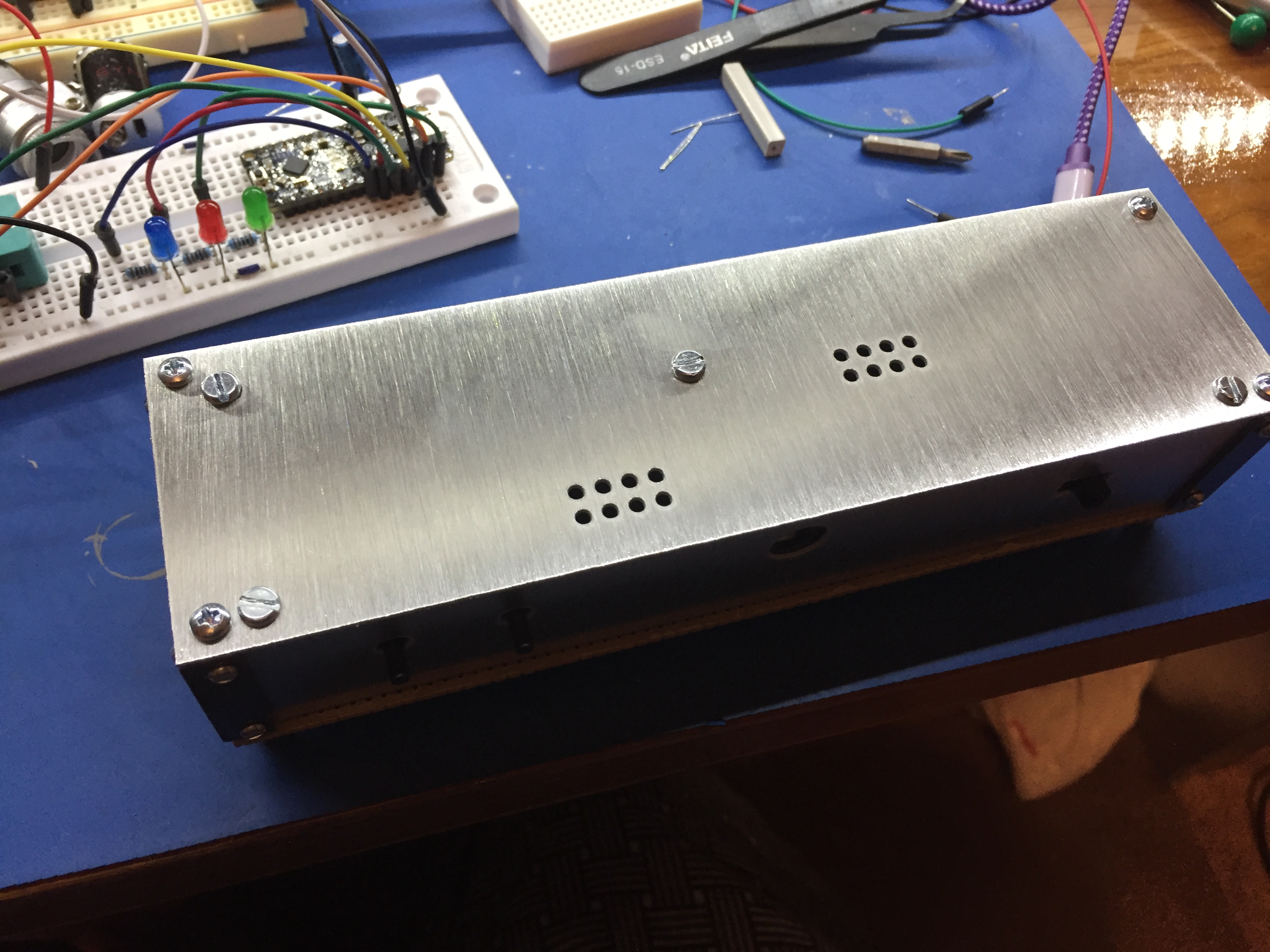
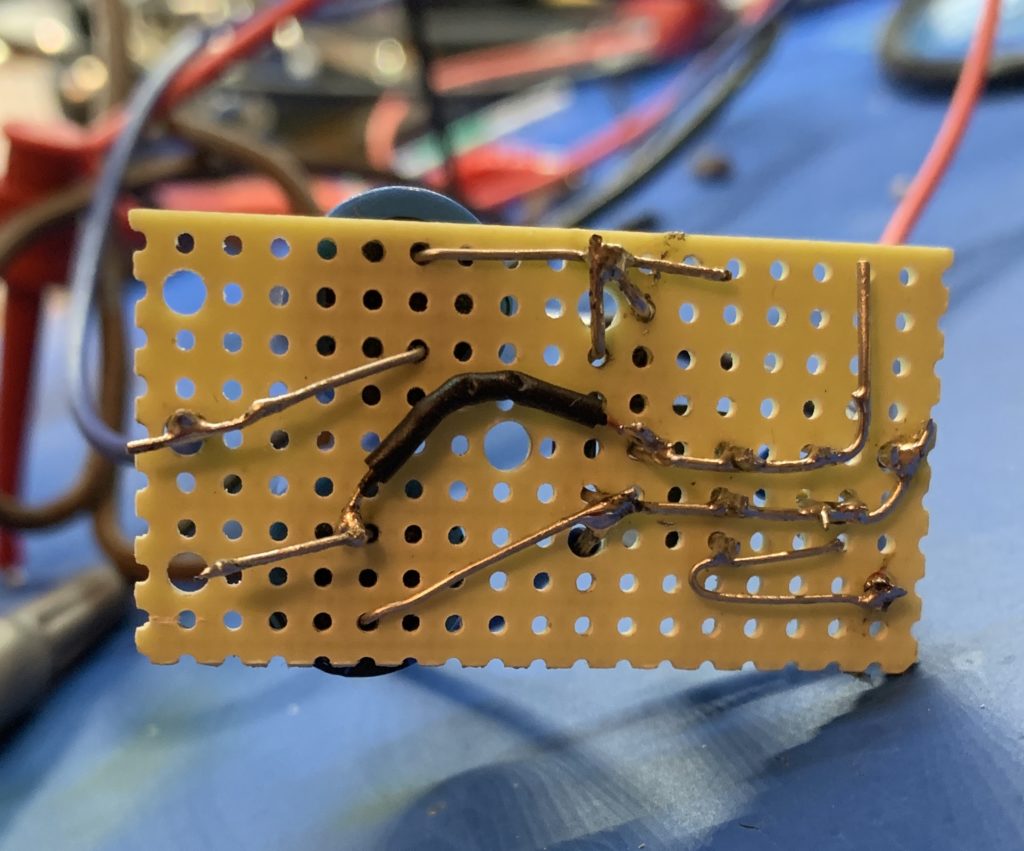
This is what it looks like underneath:
Finally, here is what the module, switch and auto-transformer look like in one of the radios I modded. In this case the switch was already there from a mod that had been made in the dim and distant past: